
Tag Orientation and Acceleration
Orientation
General Description
- Given in Quaternions
- qw as Scalar Quaternion
- qx as X-Rotation Quaternion
- qy as Y-Rotation Quaternion
- qz as Z-Rotation Quaternion
- Hamilton Convention
- Right-Handed System
- Rotates from Inertial Frame (on Tag) to World Frame (East-North-Up)
Inertial Frame
The original Coordinate System of the Tag.

The Inertial Coordinate System is always the same on the Tag, regardless how the Tag is oriented in the Environment.
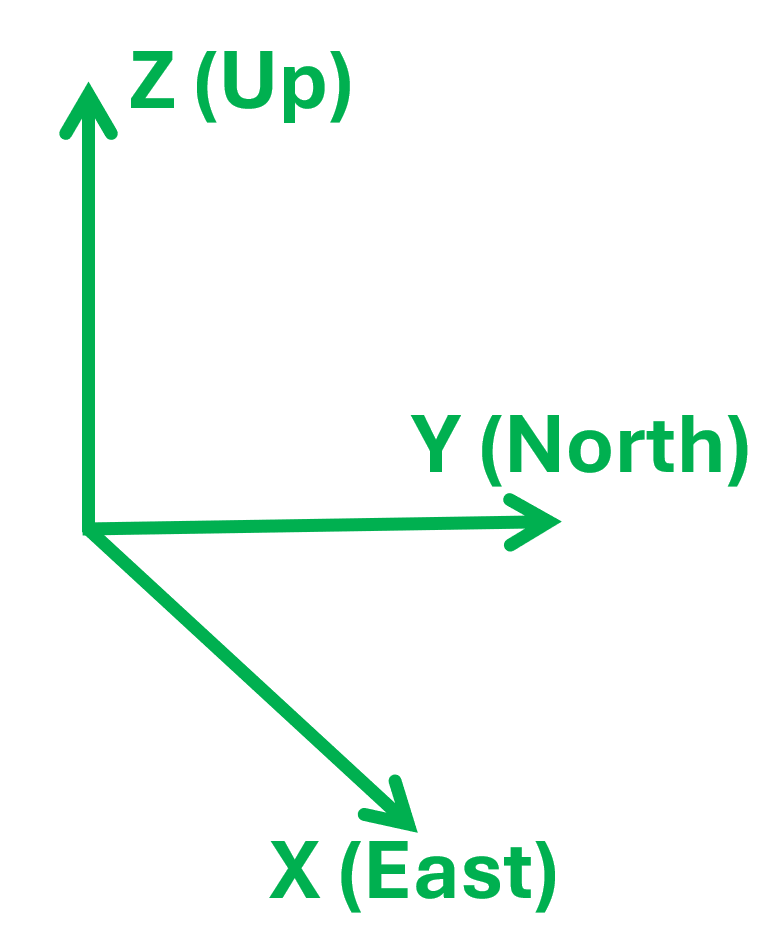
World Frame
The World Coordinate System aligned with the Magnetic North
- East-North-Up (ENU) Convention
- X is aligned with East
- Y is aligned with the North
- Z is aligned with the height
Rotation with Quaternions
Assume a Vector V_Inertial shall be rotated from the Inertial Frame (on Tag) to the World Frame (East-North-Up) V_World.
The Vector V_Inertial consists of Vx_Inertial, Vy_Inertial and Vz_Inertial.
The Vector V_World consists of Vx_World, Vy_World and Vz_World.
Vx_World = Vx_Inertial * (1 - 2 * (qy^2 + qz^2)) + Vy_Inertial * 2 * (qx * qy - qw * qz) + Vz_Inertial * 2 * (qw * qy + qx * qz);
Vy_World = Vx_Inertial * 2 * (qx * qy + qw * qz) + Vy_Inertial * (1 - 2 * (qx^2 + qz^2)) + Vz_Inertial * 2 * (-qw * qx + qy * qz);
Vz_World = Vx_Inertial * 2 * (-qw * qy + qx * qz) + Vy_Inertial * 2 * (qw * qx + qy * qz) + Vz_Inertial * (1 - 2 * (qx^2 + qy^2));
There are several ways to rotate a 3D Vector. We provided above a closed-form solution, where the Quaternions are converted to a Rotation Matrix, which is multiplied with the previous Vector.
The Formulas above can always be used for Quaternions with the Right-Handed and Hamilton Convention
Right-Handed Quaternion Conversion to Left-Handed Quaternion
- Some external Software Solutions use Left-Handed Quaternion Convention
- Therefore, the Right-Handed Hamilton Quaternions from the API have to be converted to the Left-Handed Hamilton System:
- Exchange the Z with the Y Quaternion
- Negate the X, Y and Z Quaternion
qw_LeftHanded = qw;
qx_LeftHanded = -qx;
qy_LeftHanded = -qz;
qz_LeftHanded = -qy;
This was just an example for the Conversion to Left-Handed Systems. Different external Software Solution may have different Orientation Conventions. The Orientation Conventions between the API (Hamilton, Right-Handed) must match with the external Software Solution's Convention. Otherwise the results are wrong.
Acceleration
General Description
- Given in 3D in m/s^2
- Inertial Acceleration:
- Data from Sensor
- Scaled and Bias compensated
- axInertial as the Acceleration in the inertial X-Direction
- ayInertial as the Acceleration in the inertial Y-Direction
- azInertial as the Acceleration in the inertial Z-Direction
- World Acceleration:
- Rotation from Inertial Frame to World Frame already applied
- Scaled, Bias compensated, Low-Pass and High-Pass filtered
- axWorld as the Acceleration in the East-Direction
- ayWorld as the Acceleration in the North-Direction
- azWorld as the Acceleration in the Up-Direction
The World Acceleration from the API is already rotated towards East-North-Down and preprocessed (Bias, Noise and Drift compensated) and can be used without further adjustments required.
Acceleration Conversion to Left-Handed Coordinate System
- Some external Software Solutions require Left-Handed Coordinate Systems
- Therefore, the Right-Handed Coordinate System from the API has to be converted to the Left-Handed Coordinate System:
- Exchange the Z with the Y Acceleration
axWorld_LeftHanded = axWorld;
ayWorld_LeftHanded = azWorld;
azWorld_LeftHanded = ayWorld;
This was just an example for the Conversion to a Left-Handed Coordinate System. Different external Software Solution may have different Coordinate System Conventions. The Coordinate System Conventions between the API (Right-Handed) must match with the external Software Solution's Convention. Otherwise the results are wrong.
Updated 5 months ago
Did this page help you?